2012 – 1コ1コ
未来ロボティクス学科・学部1年 安藤雅幸
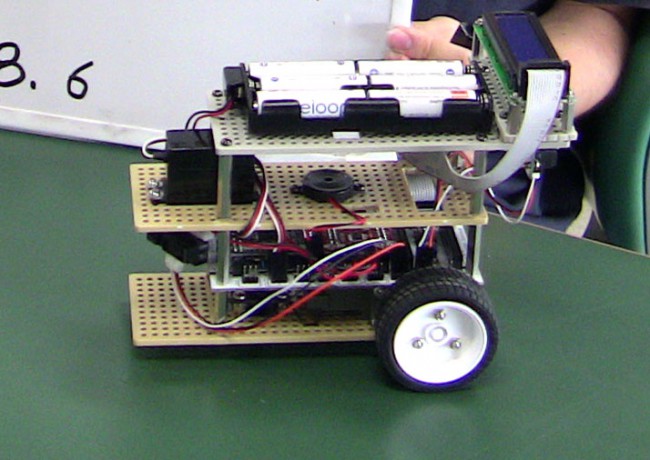
障害物をよけるロボット。
前方に取り付けたサーボモータに距離センサを付けました。その距離センサで障害物を判断しよけます。
また距離センサの角度によって速度も制御し、障害物の場所もLCDで表示しています。
COMMENTS
コメントはありません。

障害物をよけるロボット。
前方に取り付けたサーボモータに距離センサを付けました。その距離センサで障害物を判断しよけます。
また距離センサの角度によって速度も制御し、障害物の場所もLCDで表示しています。
コメントはありません。
![]()