
2011 – 明るい方向/物が動いた方向をサーチして進むクローラ型ロボット
未来ロボティクス学科・学部1年 益子泰一郎
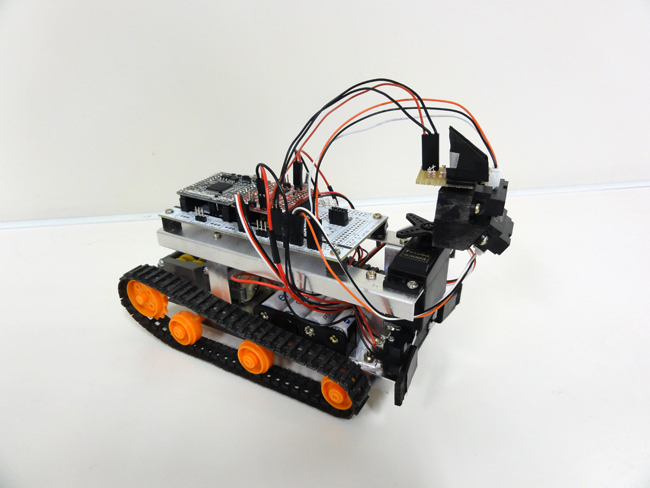
・サーボモータで光センサとPSDx2を回転させて周囲(9方向)をサーチして進む
・各方向の明るさを比較しやすくするためにセンサの周りにガイドを設けている
・前方下部の左右に設けたバンパーセンサーでハードウェア的にモータに流れる電流の向きを反転して障害物をよける(Hブリッジ回路の応用)機構
・2種類の動作モード「明るい方向へモード」と「物が動いた方向へモード」
【明るい方向へモード】
・光センサを回転させて周囲をサーチし、明るい方向に進む
・光の方向に進む際、前向きのPSDで前方の障害物を検知して回避
・同じく前斜め下向きのPSDで前方の段差(凹み)を検知して落下しないようにする
・乗り越えられる段差ならバックで上る機能
【物が動いた方向へモード】
・PSDを回転させて周囲を2度サーチし、変化のあった(物が動いた)方向へ進む
< 研究員からのコメント >
多数のセンサを使って多彩な動きを実現。バンパーセンサでハードウェア的にモータに流れる電流の向きを反転して障害物をよける機能もあり、アルゴリズムが煩雑にならないように工夫されている。
多機能でありながら細かいところまでよく考えてつくられている。
COMMENTS
コメントはありません。